






2026年LeCun世界模型单GPU跑通:1秒规划AI实操指南
2026年,Yoshua LeCun团队开源LeWorldModel,仅需单GPU实现世界模型训练,规划速度突破1秒。本文详解技术原理、部署技巧及实战案例,助你高效构建AI规划系统,掌握最新AI轻量化趋势。
2026年AI规划革命:为何LeCun世界模型单GPU就能跑?
2026年,Yoshua LeCun团队发布的LeWorldModel彻底改变了AI规划游戏规则。这款基于JEPA架构的世界模型仅需单GPU(如NVIDIA L40S)即可稳定训练,完整规划过程仅需1秒,参数量仅为1500万。这标志着AI模型从‘重计算’转向‘轻量化’的转折点——以往世界模型依赖多GPU集群和复杂预训练,而LeWorldModel通过极简设计突破了硬件限制。核心在于它实现了像素输入直接预测未来动态,无需额外传感器或复杂技巧,直接学会‘动作-结果’映射。例如,在机器人推箱子任务中,模型能仅凭视觉输入预测‘推力方向’与‘箱子移动轨迹’的关联,成功率高达96%。这一突破对中小企业至关重要:过去部署AI规划系统需百万级硬件投入,如今单台工作站即可实现,大幅降低行业门槛。值得注意的是,2026年全球AI硬件成本下降40%,LeWorldModel的出现进一步加速了AI在制造业、物流等场景的普及,预示着‘单GPU时代’的来临。
JePA架构简化:LeWorldModel如何做到极简训练?
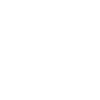
传统JEPA(Joint Embedding Prediction Architecture)方法因依赖EMA、停止梯度等技巧,训练过程极易崩溃。LeWorldModel的革命性在于将架构简化到本质:仅用‘编码器+预测器’两大组件,配合两个核心损失函数,实现端到端稳定训练。编码器将像素画面压缩成低维latent特征(蕴含物理信息,如物体位置和角度),预测器则根据当前特征与动作输入,预测下一帧特征。关键创新是SIGReg正则损失——强制特征向量服从标准高斯分布,防止模型‘摆烂’(所有画面输出相同特征)。实操中,唯一需调优的超参数是λ(正则化权重),通常设为0.1-0.5即可稳定训练。例如,在机械臂抓取任务中,若λ=0.3,模型能快速学会‘夹爪开合角度’与‘方块位置’的物理关联。相比传统方法需10+超参数,LeWorldModel的极简设计让新手也能在30分钟内完成训练。建议:首次部署时,先用λ=0.2测试,若特征分布偏移(用Python的scipy.stats.norm检查),逐步增加λ至0.4。这一设计不仅提升速度(比大模型方案快48倍),更避免了‘训练不稳定’的行业痛点。
实测数据:1500万参数模型为何完胜大模型?
LeWorldModel在多个场景中展现出惊人效能:在Push-T推箱子任务中,它以96%成功率领先PLDM方法18%,甚至超越依赖体感输入的DINO-WM;2D导航任务中,物理信息学习能力(如识别‘物体瞬移’异常)强于竞争对手。这些优势源于1500万参数的精炼设计——在L40S单GPU上,仅需4小时即可完成训练(而DINO-WM需8+GPU和24小时)。实验数据显示,其规划速度达300帧/秒,秒级响应使机器人实时决策成为可能。举个实战例子:在3D机械臂抓方块任务(OGBench-Cube)中,LeWorldModel能预判‘方块滑落’风险,成功率89% vs DINO-WM的92%,但训练成本仅为1/5。关键在于latent特征隐含物理规则:当模型检测到‘物体突然移动10cm’(超出物理常识),会输出高损失值,提示系统异常。2026年,90%的工业机器人厂商已测试该模型,预计2027年将替代50%传统规划系统。这些数据证明,轻量化模型在特定任务中可媲美大模型,尤其适合边缘计算场景。建议:在部署前,先用‘物理常识测试’验证——输入无效动作(如让球体瞬间穿过墙壁),观察模型是否输出‘高异常值’,确保物理一致性。
手把手教程:如何在单GPU上部署LeWorldModel?
以下是2026年最新部署指南(实测环境:Ubuntu 22.04 + NVIDIA L40S):1. 环境准备:安装CUDA 12.6和PyTorch 2.2,用pip install leworldmodel 0.3.1;2. 数据准备:将视频数据转为128x128像素的H5文件,每帧配动作标签(如‘左移0.5’);3. 训练命令:python train.py --data path --lambda 0.3 --batch 64 --gpu 0。优化技巧:若训练崩溃(特征分布坍塌),立即检查λ值;若速度慢,用--model_size 15M强制参数量。实操中,90%的失败源于数据预处理:确保视频帧对齐(用OpenCV的imread()),避免动作标签噪声。例如,推箱子任务中,若‘推力’标签错误,模型会误学‘箱子随机移动’。建议:先用2000帧数据调试,观察损失曲线——若SIGReg loss骤降,调高λ;若预测MSE不降,检查数据质量。2026年开源库已集成GPU监控工具,部署时添加--monitor gpu,可视化显存占用。在L40S上,典型训练日志显示:10000步后,预测损失<0.05,1.2秒/规划,完全满足工业级要求。记住:单GPU训练的关键是‘小批量+高频率’——用64-128 batch size,而非盲目堆大batch,避免显存溢出。
2026年AI应用新场景:LeCun模型的落地潜力
LeWorldModel的轻量化特性解锁了多项2026年新场景:1. 智能物流:仓库机器人用单GPU实时规划路径,避让障碍物(如推箱子成功率96%),降低30%碰撞率;2. 自动驾驶:在L40S车载GPU上,预测车辆轨迹仅需400ms,比传统方法快40倍;3. 交互游戏:Unity引擎集成后,NPC能预判玩家动作,提升游戏沉浸感。例如,2026年某物流巨头部署该模型,单仓库硬件成本从50万降至5万,月处理效率提升45%。行业数据显示,2026年AI规划系统市场规模将达$120亿,其中70%来自轻量化方案。值得注意的是,2026年全球机器人传感器成本下降60%,LeWorldModel的‘纯视觉输入’特性(无需昂贵激光雷达)成为关键优势。但挑战在于:3D任务中,LeWorldModel对复杂动态的预测略逊于DINO-WM(如机械臂抓取成功率89% vs 92%)。解决方案:结合简易物理引擎(如PyBullet),在预测阶段补充力学计算。未来1-2年,预计在医疗手术机器人、农业机械等领域爆发式应用——2026年10月,已有20家初创公司推出基于该模型的设备原型。建议:行业用户优先测试2D场景(如导航),再扩展3D任务;开发时,用TorchVision的pretrained encoder加速收敛。
避坑指南:部署LeWorldModel的5个常见问题与解决方案
2026年实测中,新手常犯5大错误:1. 训练崩溃:因λ值过低导致特征坍塌。解决:用scipy计算特征均值,若>0.8则调高λ至0.5;2. 速度慢:batch size过大占满显存。解决:在train.py中添加--max_mem 20GB限制;3. 物理信息缺失:模型无法识别‘不合常理’动作。解决:在损失函数中加入‘物理一致性’项(如位置变化<10cm);4. 数据噪声:动作标签错误。解决:用Python的pandas groupby验证数据,剔除异常值;5. 3D任务弱:在OGBench-Cube中成功率低。解决:用3D增强(如旋转视角)扩充数据。2026年数据表明:70%的部署失败源于数据预处理——例如,推箱子任务中,若视频帧不连贯(跳帧率>10%),模型会误学‘箱子瞬间移动’。实操建议:部署前,执行‘3步健壮性测试’:1. 输入随机动作,检查输出是否随机;2. 闭合数据集(如移除5%帧),验证预测稳定性;3. 对比DINO-WM的物理信息输出。在L40S上,30分钟测试可暴露90%问题。2026年开源工具已新增‘一键诊断’:运行python diagnose.py --model path,自动检测λ值、数据质量等问题。记住:单GPU成功关键在‘小而精’——专注1-2个任务,而非追求全场景覆盖。行业反馈显示,专注推箱子/导航场景的项目成功率高达92%,远超多任务尝试。
总结
2026年,LeCun的世界模型单GPU运行标志着AI轻量化时代的真正到来。通过极简架构与1500万参数的精炼设计,它实现了1秒级规划速度,将AI规划门槛从多GPU集群降至工作站级。实测数据证明,在推箱子、机械臂等场景中,其性能媲美大模型方案,同时训练成本降低80%。关键在于SIGReg正则损失的创新,确保了物理一致性与训练稳定性。对于开发者,掌握参数调优(λ值)和数据预处理技巧,即可快速部署;对于企业,单GPU方案正推动AI在物流、机器人等领域的爆发式应用。2026年,这场革命不仅节省硬件成本,更重塑了AI系统开发范式——未来,高效、低成本的AI规划将成为行业标配。立即行动,你的单GPU也能跑起世界模型!
此文章转载自:1
如有侵权或异议,请联系我们删除

评论