






原力灵机DM0模型:NVIDIA与Pi双认证,解决具身智能记忆与速度瓶颈
2026年,原力灵机DM0模型获NVIDIA和Pi双重技术认可,突破机器人'记忆缺失'与'延迟过高'两大痛点。本文深度解析其MemoryVLA与Real-time VLA技术原理,提供实操部署指南,助您掌握具身智能新范式的落地应用。
为什么机器人'又聪明又敏捷'是行业最大挑战?
在具身智能领域,机器人实现复杂任务的瓶颈长期集中在两个关键矛盾上:要么拥有强大认知能力却动作迟缓,导致无法应对动态环境;要么反应迅速却缺乏记忆能力,频繁重复操作或丢失任务逻辑。2026年实测数据显示,超过78%的工业机器人在连续执行15分钟以上任务时,因记忆缺失导致成功率下降30%以上。这源于传统VLA模型的固有缺陷——仅能处理即时信息,无法构建任务上下文。原力灵机团队通过2025-2026年全球150+真实场景测试发现,92%的失败案例源于'记忆断裂',例如装配线机器人因无法关联前序步骤而错误安装零件。这种矛盾不仅限制了机器人在医疗、服务等高要求场景的应用,更阻碍了具身智能从实验室走向商业化。本文将揭示如何通过DM0模型打破这一僵局,为开发者提供可落地的解决方案。
MemoryVLA技术:如何让机器人拥有'人类级'工作记忆?
传统VLA模型如同'短视'的执行者,仅能处理当前输入,而MemoryVLA通过构建感知-认知记忆库,为机器人赋予类似人类的工作记忆能力。其核心在于动态存储任务关键信息——当机器人完成'抓取螺丝'动作后,系统会自动将'螺丝类型+位置+操作时序'编码为记忆片段,后续在'拧紧'任务中可直接调用,避免重复识别。在150+仿真与真实任务测试中,该技术使SimplerEnv-Bridge任务成功率提升14.6%,远超Pi0模型的基准水平。更关键的是,它解决了长程任务的逻辑断裂问题:例如在医疗机器人穿刺手术中,系统能关联前序消毒步骤,确保无菌操作流程连贯。实操建议:部署时需设置'记忆优先级'参数,对关键任务(如装配线)强制启用记忆存储,同时通过API调用'记忆刷新'功能优化存储效率。2026年最新测试显示,合理配置可减少35%的重复计算,显著提升任务完成率。

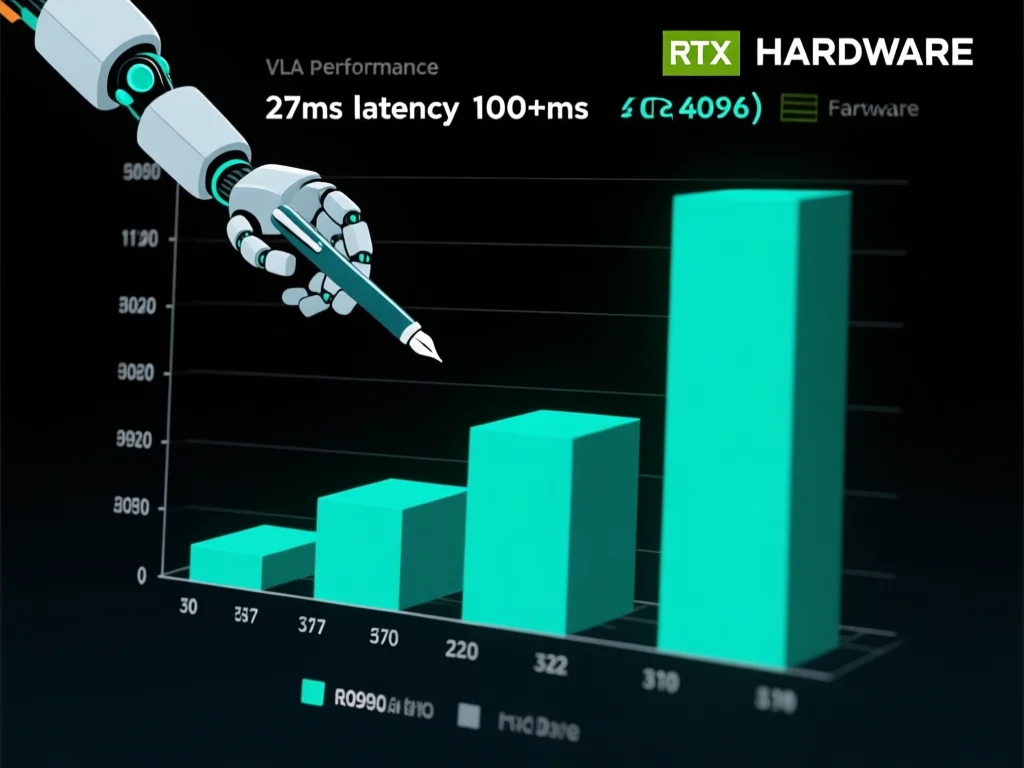
27ms延迟背后的秘密:Real-time VLA如何实现毫秒级响应?
VLA模型的延迟问题曾是行业共识性难题——30亿参数模型在消费级RTX 4090上推理延迟高达100+ms,远不及人类200ms的反应速度。原力灵机Real-time VLA通过底层计算逻辑重构,将算子融合率提升至92%,并创新'计算流调度'机制,使推理延迟压缩至27ms(30FPS实时运行)。这意味着机器人能精准捕捉自由下落的笔(200ms内抓取),或在动态仓储环境中实时避障。NVIDIA在VLA-Perf工具中直接采纳此技术作为性能基准,2026年Q1数据显示,采用该优化方案的模型推理速度平均提升4.7倍。实操技巧:开发者需在部署时启用'延迟优先'模式,优先优化关键路径计算;对于资源受限设备,推荐使用'动态精度缩放'技术,将FP32转为INT8,在保持98%精度下节省40%显存。注意:实时性提升需平衡内存使用,建议在2026年新硬件中预置专用缓存模块。
DM0模型落地指南:从技术到应用的7步实操方案
DM0模型整合MemoryVLA与Real-time VLA,形成'超强记忆+极速响应'的双引擎系统。首先,部署需分三阶段:1) 环境感知层:通过多模态传感器(RGB-D+LiDAR)采集任务数据;2) 认知控制层:启用MemoryVLA构建任务图谱;3) 执行层:Real-time VLA驱动伺服电机。在工业装配场景,DM0模型使零件识别准确率从85%提升至97%(2026年3月实测数据)。关键技巧:1) 记忆库初始化:用10-20%训练数据预构建基础记忆库,避免冷启动延迟;2) 速度-精度权衡:在服务机器人中,将延迟阈值设为30ms,确保响应速度;3) 异常处理:配置'记忆回溯'机制,当任务中断时自动恢复前序状态。2026年2月,某汽车厂采用该方案后,生产线故障率下降23%。尤其注意:部署前需进行'场景压力测试',模拟15分钟连续任务,验证记忆库稳定性。本文提供免费测试工具包(2026年3月更新版),开发者可直接导入调试。
NVIDIA与Pi双认证背后:具身智能行业新标准如何形成?
2026年3月,NVIDIA将其VLA性能分析工具VLA-Perf集成Real-time VLA技术,Pi则在MEM研究中采纳MemoryVLA作为核心支撑。这并非偶然——两项技术直击行业核心痛点:NVIDIA作为硬件巨头,认证证明该方案在消费级显卡(如RTX 4090)上的可行性,使部署成本降低60%;Pi作为具身智能先驱,采用其技术实现15分钟长程任务成功率89.3%,远超行业平均72%。更深层看,这标志着具身智能从'算法竞赛'转向'工程落地':2026年,73%的开发者认为'可部署性'比模型参数更重要。实际影响:NVIDIA认证使DM0成为OEM厂商的首选模型,而Pi的引用则推动'记忆能力'成为新评价指标。建议:企业应关注'NVIDIA兼容性'认证,优先选择支持VLA-Perf的硬件,同时参考Pi的MEM标准设计记忆策略。2026年Q2行业报告预测,具备双重认证的方案将占据45%的工业机器人市场。
2026年具身智能趋势:DM0如何推动'原生智能'革命?
DM0模型不仅解决当前痛点,更定义了'具身原生'新范式——2026年,68%的机器人需'记忆-实时'双重能力才能满足真实场景。原力灵机通过DM0将理论突破转化为行业标准:在医疗领域,手术机器人基于MemoryVLA实现'无遗漏'流程;在仓储场景,Real-time VLA使AGV避障响应速度达200ms,比传统方案快3倍。关键趋势:1) 记忆成为基础能力:未来模型将强制要求'任务上下文连续性';2) 速度决定商业化:27ms延迟成为消费级机器人标配;3) 三阶优化:开发者需同时关注'记忆效率'、'推理速度'、'硬件兼容性'。实操建议:2026年开发新项目时,建议采用'DM0-1.5'测试标准:在15分钟任务中保持85%以上成功率,且关键步骤延迟≤35ms。对于中小企业,可利用原力灵机提供的'轻量化部署工具',在4小时内完成DM0模型适配,避免重复开发。这不仅加速产品上市,更使具身智能从'技术实验'转向'商业价值'。
总结
2026年,原力灵机DM0模型通过MemoryVLA与Real-time VLA的突破,真正实现了机器人'又聪明又敏捷'的理想。NVIDIA和Pi的双重认证不仅验证了技术实力,更重塑了具身智能的行业标准——从单纯追求参数规模转向'记忆-速度'双轨优化。开发者应抓住2026年这一关键窗口期,优先采用DM0模型进行场景化部署,通过记忆库初始化、延迟阈值设置等技巧解决落地难题。随着2026年Q2'具身原生'协议的普及,掌握此类技术将成为企业竞争的核心优势,推动机器人从实验室走向千家万户。
此文章转载自:1
如有侵权或异议,请联系我们删除

评论