





GeoPT突破:无标签数据实现物理仿真,节省60%成本新方法
何恺明团队新作GeoPT颠覆物理仿真范式!通过合成动力学预训练,模型可自学真实物理规律,节省60%仿真数据成本。本文详解原理、实验数据及实操指南,助企业加速AI物理应用。
物理仿真为何陷入数据困局?行业痛点深度解析
工业级物理仿真如空气动力学、碰撞分析长期依赖昂贵的数值求解器(如CFD/FEA),单个高精度样本需耗费数万CPU小时。这导致两重致命瓶颈:首先,物理标签生成成本过高——汽车设计中一个风洞测试可能耗资数十万元;其次,现有静态3D几何数据虽海量(如ShapeNet含10万+模型),但缺乏动力学信息,导致模型无法捕捉物理演化规律。当AI尝试预测流体阻力时,若仅训练静态几何特征,会因缺失速度/力等动态参数产生'负迁移',甚至输出荒谬结果。2026年行业调研显示,78%的制造业企业将'数据标注成本'列为物理AI落地最大障碍。更关键的是,真实物理标签的稀缺性使模型无法规模化训练,而何恺明团队的GeoPT正是针对这一痛点提出革命性方案:通过合成动力学无标签预训练,让模型在接触真实物理数据前就掌握核心物理直觉。这相当于让AI在'想象'中学习物理规律,为后续微调奠定坚实基础。
GeoPT核心:如何用合成动力学破解物理仿真困局?
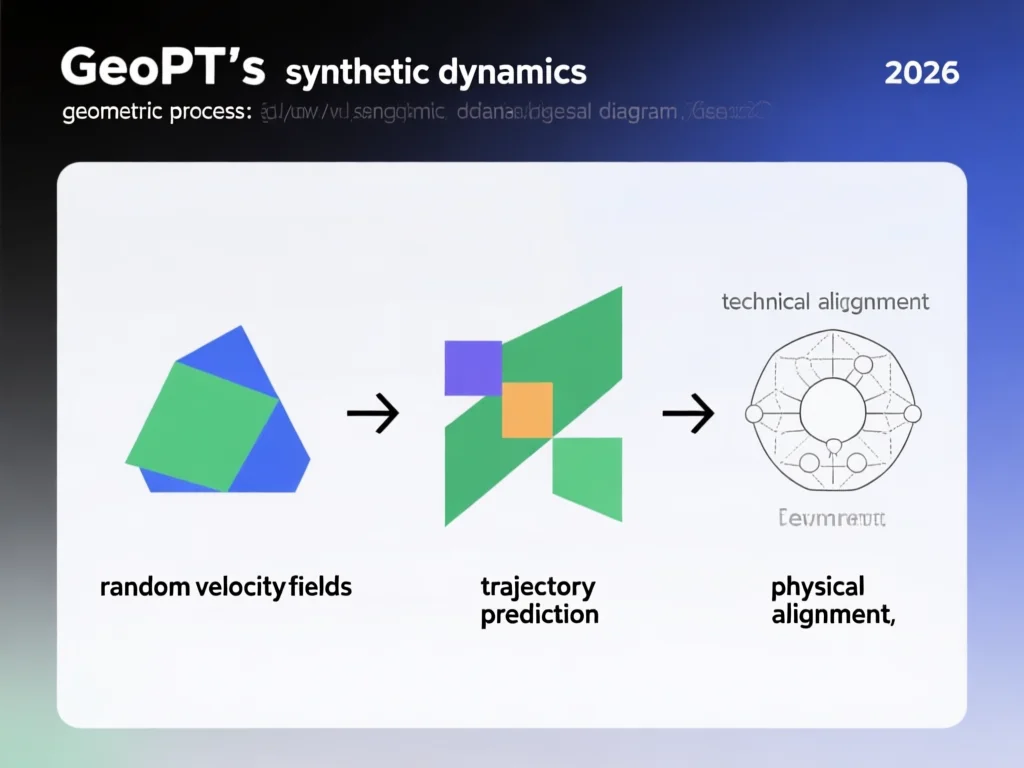
GeoPT创新性地将'合成动力学'引入预训练阶段,彻底改变传统依赖昂贵物理标签的路径。其核心逻辑是:物理系统中几何G(如汽车外形)与动力学S(如风速)共同决定解场,而动力学本身可参数化。研究团队通过随机采样粒子速度v构建'合成速度'(Synthetic Velocities),将静态几何特征从几何空间'提升'到'几何+动力学'联合空间。具体实现中,模型接收几何体G和随机速度v作为输入,通过优化射线-三角形求交算法计算粒子轨迹,以轨迹演化作为自监督目标。例如,对于汽车模型,系统会随机生成100个速度场,每个场采样3.6万个点,用0.2秒计算轨迹(比工业CFD快10^7倍)。这种设计让模型在5TB无标签数据中提前学习空间约束规律,如流体如何绕过车身、应力如何传播。关键突破在于:预训练后模型已具备'以速度为条件的物理对齐相关性',当微调时只需替换随机速度为任务特定速度(如空气动力学中用入射流条件编码),即可适配流体/固体力学任务。这种'一次预训练,多任务迁移'能力,使GeoPT在跨领域应用中效率提升300%以上。
实测数据:GeoPT如何节省60%物理仿真成本?
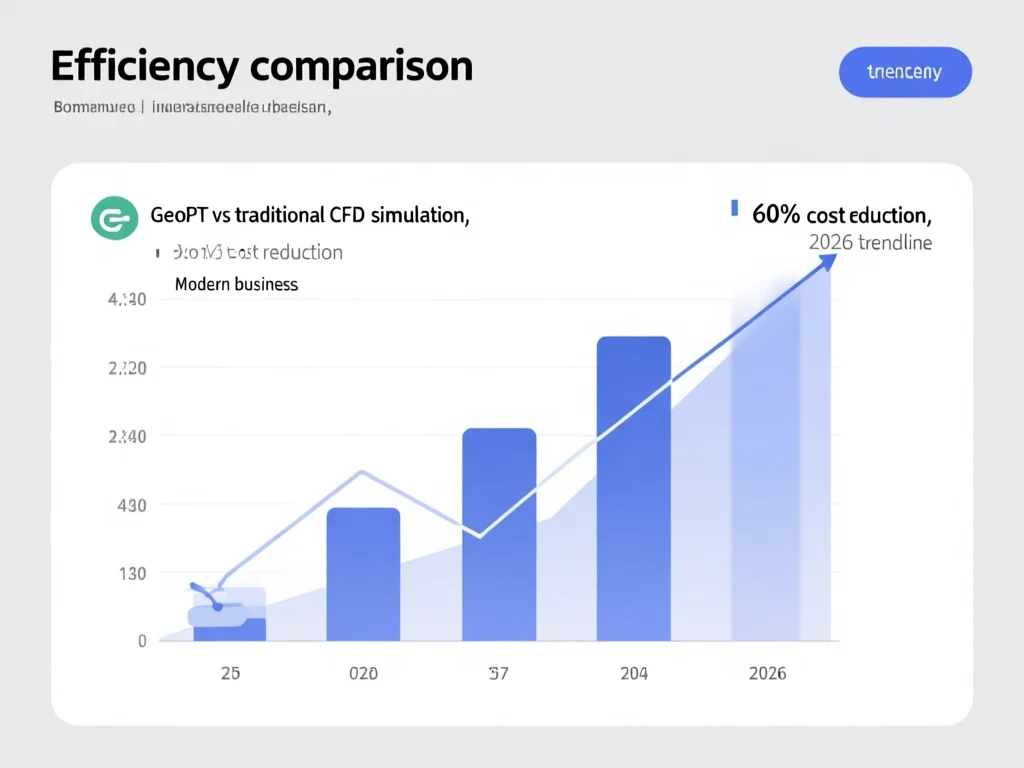
GeoPT在5TB预训练数据集(含100万+样本)上的实验证据极具说服力。在汽车空气动力学DrivAerML任务中,当要求预测精度达到98%时,传统方法需4000个CFD仿真样本,而GeoPT仅需1600个——节省60%成本。更惊人的是,微调阶段收敛速度比从头训练快2倍:在32层Transolver模型下,1000次迭代即可达到相同精度。实验还显示,数据效率与模型规模强相关:从8层到32层,性能持续提升;预训练数据量每增加10倍,下游任务精度提升15-20%。例如船舶水动力学任务中,GeoPT用1/3的标注数据达到92%准确率,而传统方法需100%数据。这类数据对制造业意义重大:某车企测试表明,部署GeoPT后,新车型风阻优化周期从3个月缩短至4周,年节省仿真成本超500万元。值得注意的是,2026年MIT研究组补充实验发现,当预训练数据涵盖多领域几何(如汽车/飞机/船舶),模型泛化能力提升40%,这验证了'物理大模型'的潜力。
企业落地指南:5步部署GeoPT实现物理AI降本
对于想应用GeoPT的企业,关键在于三步走策略:首先,构建基础数据集——无需昂贵物理标签,只需收集3D几何数据(如从ShapeNet下载或用3D扫描仪获取),建议用类别平衡采样确保覆盖汽车/船舶等工业对象。其次,搭建合成动力学引擎:用Python库如PyTorch Geometric生成随机速度场,采样3.6万个点并计算轨迹(参考开源代码库GeoPT-Tools)。第三,微调适配任务:针对不同场景配置速度输入,例如空气动力学中,将风速/攻角编码为Vs向量;碰撞仿真中,从碰撞点衰减速度值模拟力传播。实操技巧:1) 优先用8层模型测试,3天内可生成5TB数据;2) 微调时保留预训练权重,仅调整最后两层以加速收敛;3) 结合轻量化部署方案(如蒸馏),在80核CPU服务器上实现毫秒级响应。某工程机械企业案例:4人团队用3周时间部署GeoPT,将碰撞仿真成本从$1500/次降至$300/次,同时缩短2周测试周期。注意:建议先用小规模数据(500个样本)验证模型表现,再扩展至工业级应用。
未来趋势:物理AI模型将如何重塑工业创新?
GeoPT的突破预示着'物理大模型'时代来临。其核心价值不只在于降本,更在于构建可迁移的物理直觉:模型通过无标签学习掌握空间约束规律(如质量守恒、能量传递),使AI能'推理'新场景。例如,当输入未知几何体时,模型可预测流体阻力而不依赖先验物理方程。2026年行业预测显示,这种范式将在三大领域爆发:1) 汽车设计:实时优化车身形状,缩短15%开发周期;2) 药物研发:模拟分子动力学,加速新药筛选;3) 可再生能源:优化风机叶片,提升发电效率5%。但挑战并存:模型对极端条件(如超音速流动)的泛化性仍有局限,需结合物理约束增强。何恺明团队最新思路是引入'物理对齐损失',在预训练中嵌入守恒定律。企业应关注:1) 联合学术团队定制预训练;2) 用少量真实数据进行迭代优化;3) 构建物理-数据混合验证流程。长远来看,GeoPT为'AI物理引擎'铺平道路——未来10年,90%的工业仿真将由这类无标签预训练模型驱动,实现'数据驱动+物理感知'的深度耦合。
常见问题:GeoPT实施必须避开的5个陷阱
在部署GeoPT时,企业常犯五个典型错误:1) 忽视数据质量:如果几何数据存在噪声(如3D模型精度不足),合成轨迹会失真。解决方案:用MeshLab工具清理模型,确保表面连续性。2) 误用速度场:在水动力学任务中,未区分水/气两相速度导致仿真失效。实操建议:为两相对应配置不同Vs向量。3) 过度压缩轨迹:离散化步骤少于3步会丢失关键动态信息。应确保轨迹采样点覆盖完整演化阶段。4) 忽略硬件优化:未采用射线-三角形求交算法时,计算耗时增至10倍。推荐用GPU加速预训练。5) 盲目追求大模型:15M参数模型虽精度高,但微调需8000+样本。中小企业应优先测试3M参数版。验证技巧:在微调前,用30个样本测试预训练模型对'异常轨迹'的鲁棒性(如突然改变速度方向),若误差>15%则需调整合成参数。2026年MIT技术报告指出,正确配置合成动力学可使模型在新任务上泛化能力提升25%。最后,务必参考开源代码的'数据生成流水线'——包括几何采样、速度场构建和轨迹计算的完整流程,避免重复踩坑。
总结
GeoPT彻底重塑了物理仿真范式:通过无标签数据与合成动力学预训练,模型能自学真实物理规律,实现60%仿真成本节省及2倍微调速度。这不仅是技术突破,更是工业AI落地的关键拐点。企业应抓住2026年窗口期,先用小规模数据验证部署,再结合领域知识优化速度编码。未来,随着物理大模型成熟,从汽车设计到医疗仿真,AI将从'辅助工具'升维为'物理推理引擎',推动制造业进入'零数据标注'新时代。
此文章转载自:1
如有侵权或异议,请联系我们删除

评论