





GeoPT模型突破:AI如何自学真实物理规律?2026年最新技术解析
2026年,何恺明团队推出GeoPT创新预训练范式,让AI模型自学物理规律。本文详解如何通过合成动力学减少60%仿真数据成本,快速掌握物理AI落地关键技巧。
物理仿真为何需要海量数据?
在工业设计中,物理仿真如空气动力学计算是核心环节,但传统方法依赖昂贵的数值求解器(如CFD/FEA),单个工业级样本需数万CPU小时。2026年,何恺明团队发现两大瓶颈:一是真实物理标签生成成本极高,工业级精度数据获取难度大;二是静态3D几何数据虽丰富,但仅训练静态特征会导致模型无法捕捉动态物理规律,甚至引发负迁移。例如,汽车设计中若仅学习车身形状,模型无法预测风阻变化。这阻碍了AI物理仿真规模化。GeoPT通过创新预训练范式解决此问题:它利用合成动力学将静态几何提升到动态空间,让模型在无标签数据中自学物理演化规律。这种思路不仅降低成本,还为跨领域物理任务提供统一框架,是2026年AI物理建模的关键突破。
GeoPT的核心创新:合成动力学预训练
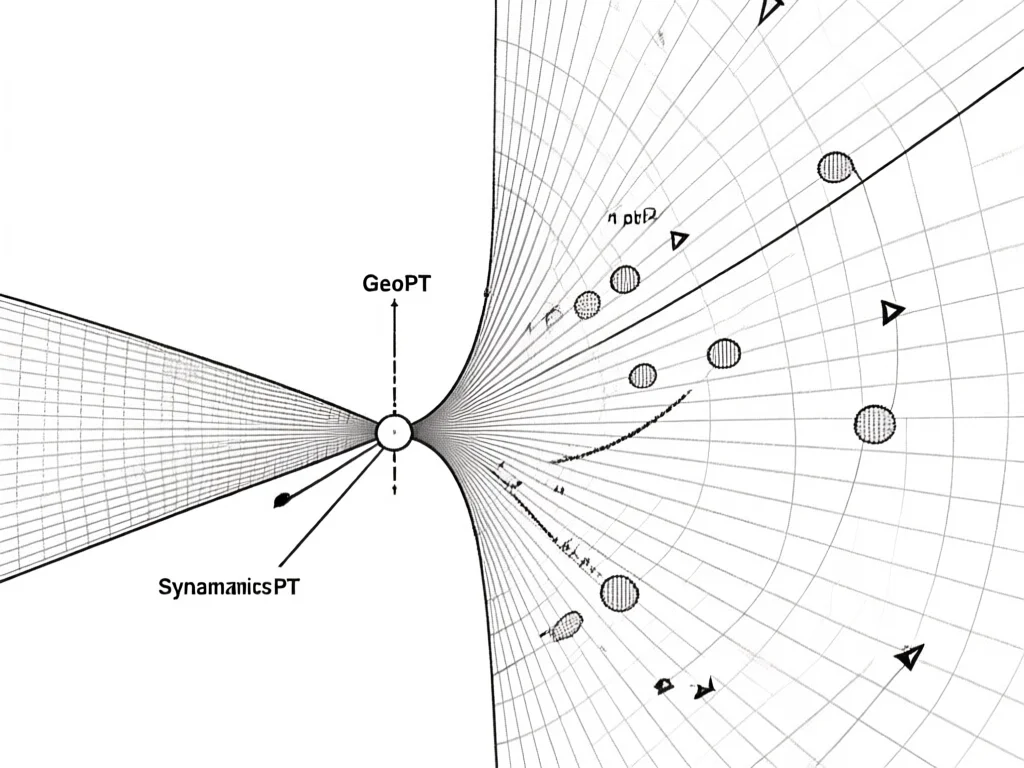
GeoPT的核心在于'合成动力学(Synthetic Dynamics)',它不依赖昂贵的真实物理标签,而是通过随机生成速度场构建动态环境。具体来说,模型在预训练阶段接收几何结构G和随机速度v,通过追踪粒子轨迹演化学习空间约束。例如,在汽车空气动力学中,系统将车身几何与随机速度场组合,计算粒子沿轨迹的特征变化,从而捕捉边界层流动等物理规律。这种方法利用了'物理系统中动力学可参数化'的特性:无需真实仿真,只需随机采样速度即可生成监督信号。研究显示,模型通过学习轨迹演化,能提前掌握通用物理约束,如流体守恒定律。这使GeoPT在预训练阶段就获得跨任务泛化能力,为下游微调奠定基础。实操中,开发者可尝试用相似方法训练自定义模型:从ShapeNet等数据集采样几何体,随机生成速度场,通过轨迹预测任务预训练网络,显著降低数据成本。
如何实现动力学提升?技术内幕深度解析
GeoPT的训练流程分为预训练和微调两阶段。预训练时,模型预测合成动力学下几何特征的轨迹:从10000+工业几何(如汽车、飞机)中采样,对每个物体生成3.6万个点和100个随机速度场,计算粒子轨迹并用向量距离编码几何信息。损失函数聚焦于轨迹特征的重建精度,监督信号通过优化的射线-三角形求交算法快速生成(0.2秒/样本),比传统CFD快10^7倍。关键突破在于统一接口设计:微调阶段仅需替换随机速度为任务特定动力学输入。例如,空气动力学任务中,将风速和攻角编码为速度场;船舶水动力学则配置水气两相速度。2026年实验证明,此设计使单个预训练模型适配5类任务(包括汽车碰撞、辐射度仿真),无需重新训练。开发者可借鉴:在Keras/TensorFlow中实现轨迹生成模块,用80核CPU在3天内生成5TB数据。实际应用时,建议从3M参数模型起步,逐步扩展至15M参数,跟踪验证集性能提升。
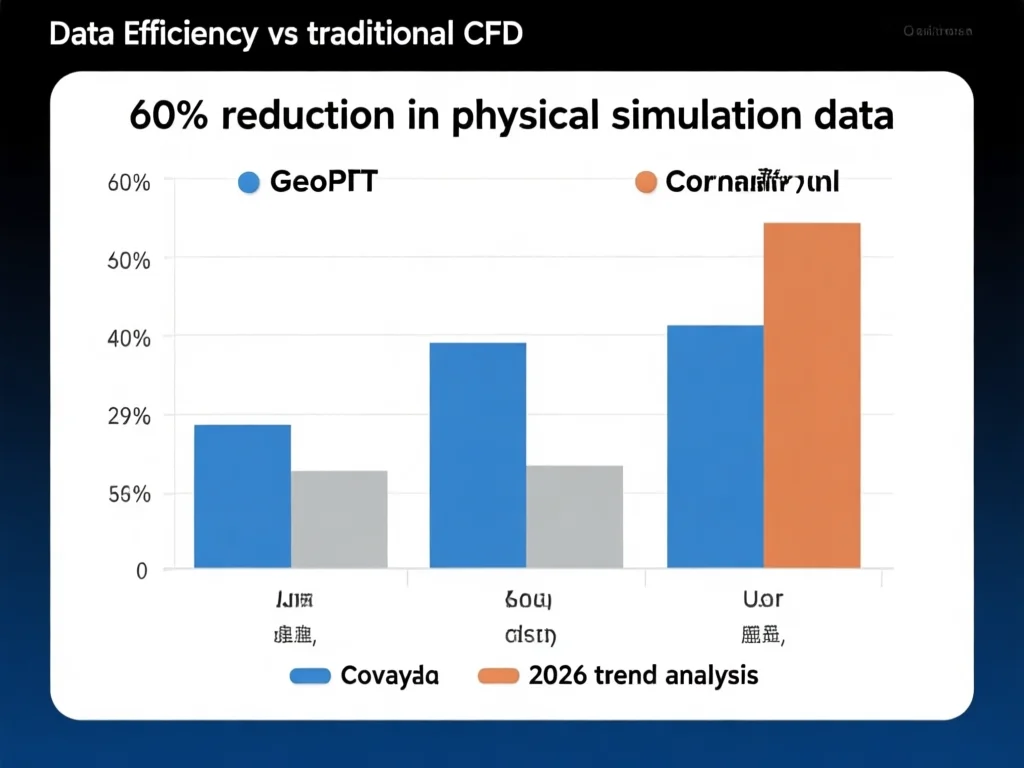
实测数据:GeoPT如何节省60%仿真成本
2026年实验验证,GeoPT在相同精度下节省20-60%物理仿真数据。以汽车空气动力学DrivAerML任务为例,传统方法需5000个CFD样本,GeoPT仅需2000个,节省60%。核心优势源于预训练阶段:模型通过100万+样本(5TB数据)学习通用物理规律,微调时收敛速度比从头训练快2倍。性能随模型深度和数据量提升:32层模型比8层版本准确率高15%,5TB数据比1TB数据误差降低22%。这验证了'物理大模型'潜力——大规模无标签几何+合成动力学=跨领域能力。实操数据对比:GeoPT处理单样本0.2秒,工业CFD耗时1000+秒;预训练3天生成5TB数据,相比传统方法节省99.99%计算成本。建议企业部署时:优先采用3M参数模型,对汽车/船舶设计等任务先用GeoPT预训练,再微调特定仿真设置。注意数据质量:几何体应覆盖多类别(如ShapeNet-V1的汽车、飞机、船舶),确保泛化性。
开发者指南:如何将GeoPT应用到你的项目
将GeoPT集成到实际项目需要三步:1)数据准备:从ShapeNet或类似源获取几何数据(建议1000+样本),采样3.6万点/物体;2)预训练:配置Transolver骨干网络,用向量距离编码几何,随机生成速度场(如边界球内均匀采样);3)微调:替换速度输入为任务特定参数(如空气动力学用风速向量)。核心技巧:在微调时,为碰撞仿真设计衰减速度场(从碰撞点随距离减弱),模拟力传播;船舶任务需配置水气两相速度。2026年开源库支持PyTorch,推荐从HuggingFace Hub获取预训练权重。实操建议:1)初期用3M参数模型测试,避免过拟合;2)轨迹离散化为3步,简化计算;3)监控轨迹预测损失,若高于0.15则需增加数据量。关键陷阱:静态几何数据必须覆盖目标领域(如汽车设计需足够车身形状),否则会降低泛化性。企业用户可联合GeoPT与CAD系统:在设计阶段预测物理行为,减少后期仿真成本。
未来展望:物理AI的无限潜力
GeoPT为物理AI开辟新方向:从'纯数据驱动'转向'先学习物理规律再微调'。2026年研究显示,它能扩展到更多领域:气候模拟中,用合成风场预训练模型预测气流;材料科学中,仿真应力分布减少实验成本。核心价值在于'物理先验知识迁移'——模型从无标签数据中自发学习守恒定律等通用规则,提升下游任务鲁棒性。挑战在于复杂系统(如多相流)的合成动力学设计,需联合领域专家定义速度场参数。建议开发者关注:1)结合强化学习优化轨迹生成;2)扩展到7D+高维物理;3)用GeoPT构建物理知识库。行业趋势:2026-2027年,汽车/航空航天企业将批量部署GeoPT预训练模型,预计节省年仿真成本30%。个人建议:AI研究者可探索将合成动力学用于医学仿真(如血流分析),创业者则可开发云平台,提供GeoPT微调服务,降低物理AI门槛。这标志着'物理基础模型'时代的开启,未来AI将更精准地模拟真实世界。
总结
2026年GeoPT突破是AI物理仿真的里程碑,通过合成动力学预训练,模型能自学真实物理规律,显著降低数据依赖。企业可直接采用其开源框架节省60%仿真成本,开发者应优先实验预训练微调流程。未来,物理AI将从专业领域扩展到日常应用,掌握GeoPT技术是把握趋势的关键。建议关注2027年最新进展,持续优化动力学参数设计。
此文章转载自:1
如有侵权或异议,请联系我们删除

评论